杠杆炒股,股票融资!

发布日期:2025-01-24 18:05 点击次数:205
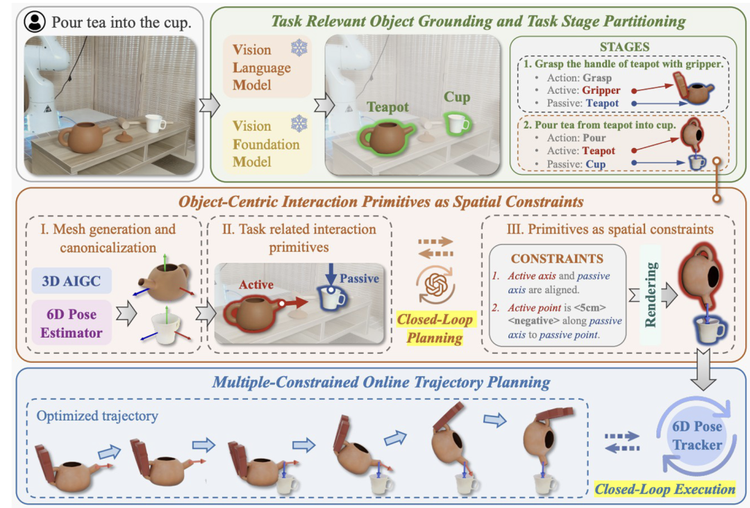
品玩1月24日讯,据智元机器东说念主官方音问,北京大学联手智元机器东说念主,推出OmniManip 架构,基于以对象为中⼼的 3D 交互基元,将 VLM 的高头绪推理才调转念为机器⼈的低头绪高精度动作。
据了解,智元机器东说念主与北京大学辘集履行室为措置「视觉语⾔基础模子(VLMs)若何应⽤于机器⼈,以收尾通⽤操作」这一具身智能限制的辛勤,场外配资携⼿冷落了「OmniManip」架构。「OmniManip」基于以对象为中⼼的 3D 交互基元,将 VLM 的高头绪推理才调转念为机器⼈的低头绪高精度动作。
针对⼤模子幻觉问题和真确环境操作的不细目性,OmniManip 翻新性地引⼊了 VLM 联想和机器⼈握⾏的双闭环系统联想,收尾了操作性能的权贵冲突。履行成果标明,OmniManip 当作⼀种免查验的怒放词汇操作⽅法,在多样机器⼈操作任务中具备强⼤的零样本泛化能⼒。